Divulgación
Divulgación




DIVULGACIÓN
Physical Review Letters publica un estudio sobre el control mutuo de retroalimentación retardada en sistemas no idénticos hecho por investigadores del IFISC
Imagina una canica rodando rápidamente exactamente haciendo círculos sobre el borde de un vaso. ¿No lo has visto nunca? No es posible porque la canica estaría en una órbita inestable. Esto significa que incluso una mala colocación microscópica o una pequeña desviación de la velocidad adecuada causarían que la canica se caiga de la órbita, ya sea dentro o fuera del vaso. Podemos encontrar ejemplos de órbitas inestables en muchos sistemas dinámicos en la mecánica, la electrónica, la fotónica, la química, la biología y en otras disciplinas. A menudo, la órbita inestable es el comportamiento deseable de un sistema, y por lo tanto, requiere un método de control. Por ejemplo, el movimiento de nuestro andar se basa en órbitas inestables también. Desde un punto de vista estrictamente mecánico no deberíamos ser capaces de caminar. Lo hacemos porque intuitivamente aprendemos a equilibrar y estabilizar nuestros movimientos.
La teoría de sistemas dinámicos ya introdujo hace 25 años un método de control genuino para órbitas inestables en sistemas técnicos. El estado actual del sistema inestable se compara con su estado antes de un período, y la diferencia se reinyecta al sistema como una señal de realimentación. El método no es invasivo, lo que significa que la fuerza de control desaparece tan pronto como se alcanza la órbita. Esta técnica se llama control de retroalimentación retardada y es ampliamente conocida por la comunidad científica. Se han presentado muchas extensiones y mejoras del método original.
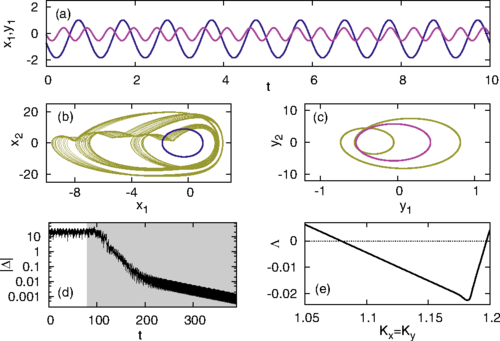
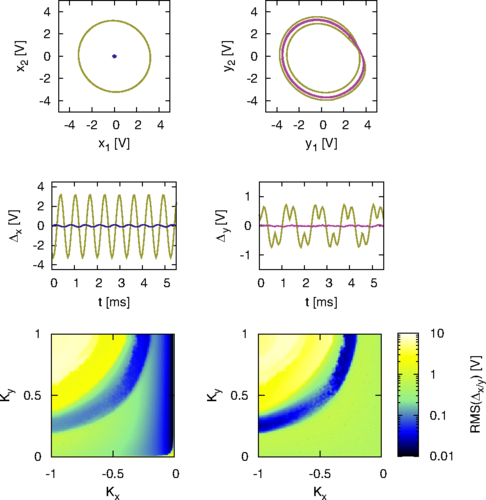
En una colaboración internacional con participación de los investigadores Thomas Jüngling e Ingo Fischer del Instituto de Física Interdisciplinar y Sistemas Complejos, IFISC (UIB-CSIC), y Wolfram Just (QMU London) y Eckehard Schöll (TU Berlin), el control de la retroalimentación retardada se ha transferido con éxito a partir de un solo sistema no lineal a una configuración de dos sistemas no idénticos. En este estudio, los dos sistemas dinámicos están acoplados de manera cruzada tal, que la señal de un sistema, que en el esquema original serviría como retroalimentación, se alimenta en el otro sistema, y viceversa. En la imagen de la canica, el nuevo método consta de dos vasos y canicas diferentes rodando con diferentes velocidades. El intercambio adecuado de información sobre la posición y velocidad de cada canica les permitiría mantener el equilibrio corriendo por sus órbitas. Los autores de este estudio demuestran por medio de consideraciones analíticas, simulaciones numéricas y también experimentos de circuitos electrónicos que este control es posible de una manera no invasiva en los sistemas reales.
Estos nuevos resultados suponen un paso importante hacia el control de los estados dinámicos en redes de osciladores acoplados, que van desde las redes neuronales hasta las redes eléctricas. Por otra parte, el control de las órbitas inestables no triviales es un tema fundamental y desafiante con un gran potencial para aplicaciones prácticas. La adaptación de tales aplicaciones de control e ingeniería de sistemas dinámicos con cierta funcionalidad puede contribuir, por ejemplo, al desarrollo de las nuevas tecnologías en informática, robótica y medicina.
http://journals.aps.org/prl/abstract/10.1103/PhysRevLett.115.194101