Outreach
Outreach




OUTREACH
Physical Review Letters published a study involving researchers of the IFISC on mutual time-delayed feedback control of non-identical systems
Imagine a marble rolling quickly in circles – exactly on the edge of a glass. Never seen anything like this? The reason is because the marble would run on a so-called unstable orbit. This means that even a microscopic misplacement or a tiny deviation from the proper speed would cause the marble to fall off the orbit, either inside the glass or outside. Unstable orbits can be found in many dynamical systems in mechanics, electronics, photonics, chemistry, biology, and other disciplines. Often the unstable orbit is the desirable behavior of a system and therefore requires a control method. For instance, the motion of human walking relies on unstable orbits as well. From a mechanical point of view we would not be able to walk. Only by intuitively learning how to balance, we stabilize our motion.
In dynamical system theory, already 25 years ago a genuine control method for unstable orbits in technical systems has been introduced. The present state of the unstable system is compared to its state one period before, and the difference is reinjected into the system as a feedback signal. The method is non-invasive, meaning that the control force vanishes as soon as the unstable is reached. This technique is called time-delayed feedback control, and it became widespread throughout the scientific community. Many extensions and improvements of the original method have been presented.
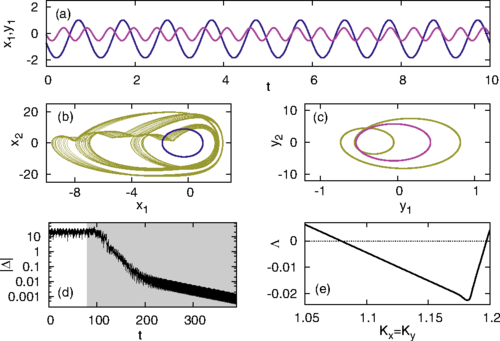
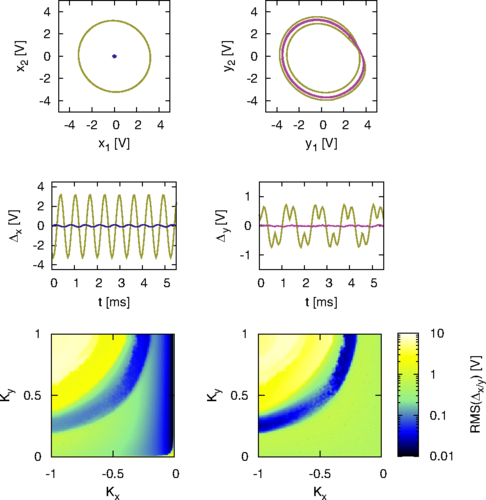
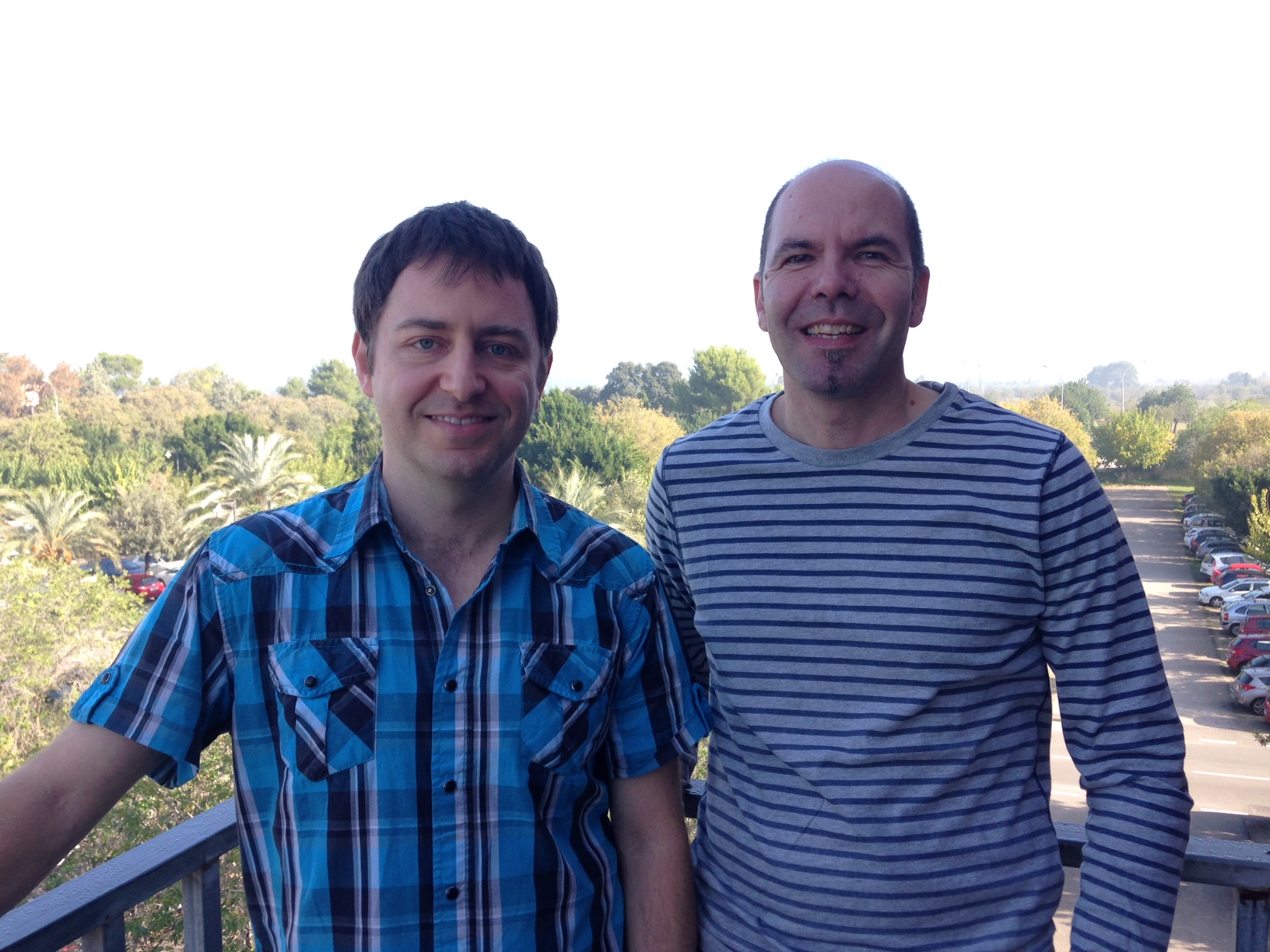
In an international collaboration involving the researchers Thomas Jüngling and Ingo Fischer from the Institute of Cross-Disciplinary Physics and Complex Systems, IFISC (UIB-CSIC), and Wolfram Just (QMU London) and Eckehard Schöll (TU Berlin), time-delayed feedback control has been successfully transferred from a single nonlinear system to a setup of two non-identical systems. In this study, the two dynamical systems are coupled in a criss-cross way such, that the signal of one system, which in the original scheme would serve as feedback, is fed into the other system and vice versa. In the picture of the rolling marble, the new setup consists of two different glasses and marbles rolling with different speeds. The proper exchange of information about position and velocity of each marble would allow them to balance on their orbits. The authors demonstrate by means of analytical considerations, numerical simulations, and electronic circuit experiments, that this control is possible in a non-invasive way in real systems.
The new results are an important step towards the control of dynamical states on networks of coupled oscillators, which range from neural networks to power grids. Moreover, the control of nontrivial unstable orbits is a challenging fundamental topic with a high of potential for applications. Tailoring such control applications and engineering networks of dynamical systems with a certain functionality might contribute to novel technologies in computing, robotics and medicine.
http://journals.aps.org/prl/abstract/10.1103/PhysRevLett.115.194101