Divulgació
Divulgació




ENLLAÇOS
PPhysical Review Letters publica un estudi sobre el control mutu de retroalimentació retardada en sistemes no idèntics fet per investigadors de lIFISC
Imagina una bolla rodant ràpidament, fent cercles exactament sobre la vora d'un got. Ho has vist mai? Aquesta imatge no és possible en la realitat perquè la bolla estaria en una òrbita inestable. Una mala col·locació a escala microscòpica o una petita desviació de la velocitat adequada causarien que la bolla caigui de l'òrbita, ja sigui dins o fora del got. Podem trobar exemples d'òrbites inestables en molts sistemes dinàmics en la mecànica, l'electrònica, la fotònica, la química, la biologia i en altres disciplines. Sovint, l'òrbita inestable és el comportament desitjable d'un sistema, i per tant, requereix un mètode de control. Per exemple, la nostra manera de caminar es basa en òrbites inestables també, quan des d'un punt de vista estrictament mecànic no hauríem de ser capaços de fer-ho. Podem perquè intuïtivament aprenem a equilibrar i estabilitzar els nostres moviments.
La teoria de sistemes dinàmics ja va introduir fa 25 anys un mètode de control genuí per a òrbites inestables en sistemes tècnics. L'estat actual del sistema inestable es compara amb el seu estat abans d'un període, i la diferència es retorna al sistema com un senyal de realimentació. El mètode no és invasiu, la qual cosa significa que la força de control desapareix tan aviat com s'aconsegueix l'òrbita. Aquesta tècnica es diu control de retroalimentació retardada i és àmpliament coneguda per la comunitat científica. Al llarg dels anys han aparegut moltes ampliacions i millores del mètode original.
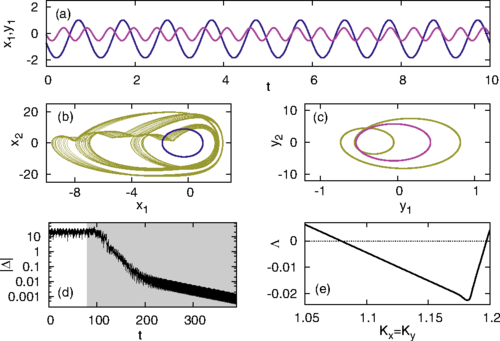
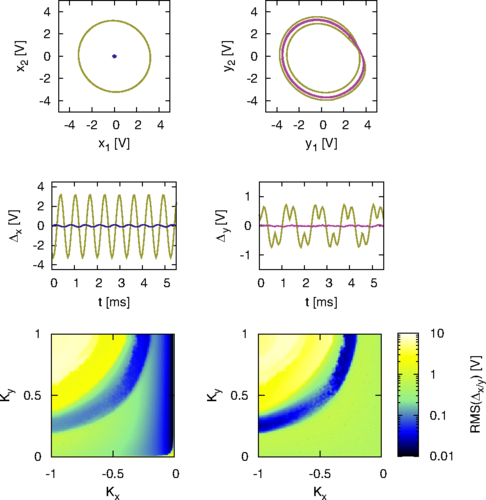
En una col·laboració internacional amb participació dels investigadors Thomas Jüngling i Ingo Fischer de l'Institut de Física Interdisciplinària i Sistemes Complexos, IFISC (UIB-CSIC), i Wolfram Just (QMU London) i Eckehard Schöll (EL TEU Berlin), el control de la retroalimentació retardada s'ha transferit amb èxit a partir d'un sol sistema no lineal a una configuració de dos sistemes no idèntics. En aquest estudi, els dos sistemes dinàmics estan acoblats de manera creuada tal, que el senyal d'un sistema, que en l'esquema original serviria com a retroalimentació, s'alimenta en l'altre sistema, i viceversa. En la imatge de la bolla, el nou mètode consta de dos gots i diferents bolles rodant a diferents velocitats. L'intercanvi adequat d'informació sobre la posició i velocitat de cada bolla els permetria mantenir l'equilibri rodant per les seves òrbites. Els autors d'aquest estudi demostren per mitjà de consideracions analítiques, simulacions numèriques i també experiments de circuits electrònics que aquest control és possible d'una manera no invasiva en els sistemes reals.
Aquests nous resultats suposen un pas important cap al control dels estats dinàmics en xarxes d'oscil·ladors acoblats, que van des de les xarxes neuronals fins a les xarxes elèctriques. D'altra banda, el control de les òrbites inestables no trivials és un tema fonamental i desafiador amb un gran potencial per a aplicacions pràctiques. L'adaptació de tals aplicacions de control i enginyeria de sistemes dinàmics amb certa funcionalitat pot contribuir, per exemple, al desenvolupament de les noves tecnologies en informàtica, robòtica i medicina.
http://journals.aps.org/prl/abstract/10.1103/PhysRevLett.115.194101